
Projektziel ist der Bau eines ferngesteuerten Flugzeugs welches über First Person View gesteuert werden kann, aber auch autark einen programmierten Kurs abfliegen kann.
Flugzeugmodell
Als Grundlage wurde der Nurflügler Albatross XXL von Küstenflieger verwendet. Dieses Modell besteht vorwiegend aus Styropor und hat eine Spannweite von knapp über zwei Meter.
| Vorteile | Nachteile |
|---|---|
|
|
Die aufgeführten Nachteile kann man durch Bespannen der Flügel mit Tape in Griff bekommen. Zusätzlich wird glasfaserverstärktes Klebeband verwendet um die Stabilität zu erhöhen. Hierdurch sind auch sehr extreme, elastische Verformungen möglich, ohne, dass es zu einem Bruch des Styroporkörpers kommt.
Bau
Erweiterung
Das Modell wurde vom Hersteller nicht als FPV-Modell konzipiert. Auch die von Küstenflieger angebotene Elektroversion mit Motor bietet keinen zusätzlichen Platz für Elektronik. Die einfachste Variante mehr Elektronik aufzunehmen wäre, diese in die Flügel einzubetten, wobei dazu großräumig Styropor entfernt werden müsste. Die elegantere Variante wäre ein Flugzeugrumpf zu schaffen, welcher die gesamte Peripherie aufnehmen kann.
Der Rumpf des Flugzeuges ist 15 cm breit und vorwiegend aus Holz gefertigt. Die Seitenrippen bestehen aus Balsaholz, die Bespannung aus 1 mm dicken hochdichten Faserplatten. Innerhalb des Rumpfes wird nicht nur die gesamte Regelungs- und Funkelektronik untergebracht, sondern auch die notwendigen Kameras. Diese sind somit windgeschützt, wodurch auch der Strömungswiderstand gering bleibt.
Durch das erhöhte Gewicht, entschied ich mich dazu, in die Flügel Holme aus GFK einzubauen. Am Rumpf sind dazu GFK-Vollstäbe mit 8 mm Durchmesser befestigt. Diese lassen sich in 10 mm GFK-Rohre einstecken die sich in den Flügeln befinden. Dadurch kann das Modell sehr einfach zerlegt werden und ist, mit minimalen Gewichtszuwachs deutlich stabiler. Zur weiteren Fixierung befinden sich je Seite zwei Holzdübel am Rumpf die ebenfalls in entsprechende Bohrungen im Flügel gesteckt werden.
 Erste Seitenrippe
Erste Seitenrippe Zweite Seitenrippe und Motoraufnahme
Zweite Seitenrippe und Motoraufnahme Fertige Motoraufnahme
Fertige Motoraufnahme



Elektronik
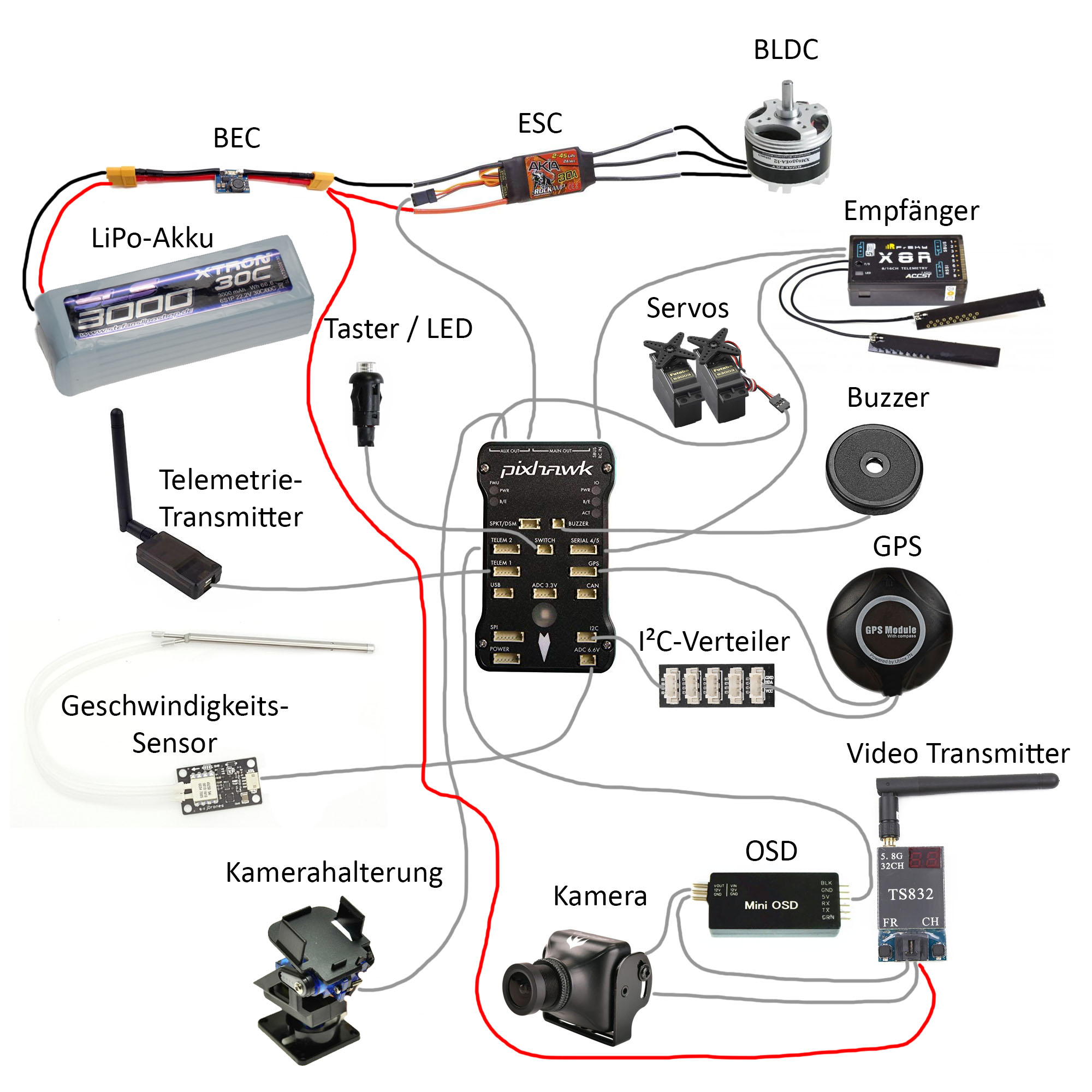
Die Elektronik ist der komplexeste Teil des Flugzeuges. Die Steuerung ist zum Teil dezentral aufgebaut. Das Herzstück bildet der Pixhawk Flightcontroller mit zwei ARM-Mikroprozessoren, diversen Sensoren und Schnittstellen.
LiPo-Akku
Ich verwende einen 3000 mAh Akku mit 30C in 4S1P-Konfiguration. Die Zahl vor dem S gibt an wie viele LiPo-Zellen innerhalb des Akkus in Serie geschaltet wurden; die Zahl vor dem P wie viele Zellen parallel geschaltet wurden. Ist der Wert 1, wurden keine Zellen parallel geklemmt. Die Nennspannung jeder Zelle liegt bei 3,7 V. So ergibt sich bei dieser Konfiguration für den Akku eine Nennspannung von 14,8 V. Der Wert 30C gibt an, dass der Dauerentladestrom bei maximal dem 30-fachen der Kapazität, also bei 90 A liegt. Diese Werte sollen für mein Flugzeug vorerst ausreichen, bei Bedarf kann der Akku jederzeit gewechselt werden.
Der Akku wird nicht fest verbaut, sondern, wie fast alles, per Klettverschluss im Flugzeugrumpf befestigt. Zum Laden verwende ich ein iMAX B6AC.
Fernsteuerung
Zum Fernsteuern wird eine Taranis X9D Plus von FrSky verwendet. Diese sendet im 2,4 GHz-Band und bieten bis zu 32 Kanäle. Neben den zwei Steuerknüppeln gibt es 2 Potentiometer, 2 Schieberegler, 6 Schalter mit je 3 Positionen, einen Schalter mit 2 Positionen und einen Taster, die alle frei verwendet werden können. Die Schalter dienen vor allem dazu die Modi des Flugzeuges umzuschalten und um Servos oder Spezialfunktionen zu bedienen. Es kann somit beispielsweise der Autopilot gesteuert werden oder auch das Abfliegen von gespeicherten Wegpunkten gestartet werden.
Standardmäßg ist auf der Fernbedienung die FrSky-eigene Firmware installiert. Es gibt jedoch auch die alternative OpenTX Firmware verfügbar diese bietet nochmal deutlich mehr Freiheiten. FrSky arbeitet dabei eng mit dem OpenTX-Team zusammen. Die Firmware vom Hersteller basiert sogar auf der OpenTX-Firmware. Hauptunterschied der OpenTX-Firmware ist, neben der freieren Programmierung, die Audio- und Sprachausgabe und die Möglichkeit Einstellungen am PC vorzunehmen und über USB an die Fernbedienung zu Übertragen.
Abhängig vom gewählten Empfänger, können bis zu 32 Kanäle übertragen werden. Ich verwende einen X8R, ebenfalls von FrSky. Er bietet 8-Servo-Ausgänge. Über den S-Bus können jedoch 16 Kanäle ausgewertet werden. Mit dem S-Port steht zusätzlich noch eine Full-duplex Leitung zur Verfügung mit der auch Daten vom Flugzeug zur Fernbedienung übertragen werden können. Dies ist besonders interessant um auf dem Display der Fernbedienung Telemetrie-Daten anzeigen zu können oder die Variometer-Funktion der Fernbedienung zu nutzen.
An die Fernbedienung angeschlossen habe ich ein TFT für das FPV-System Dieses empfängt direkt aus dem 5,8 GHz-Band das gesendete Video-Signal. Das TFT verfügt über einen integrierten Akku. Eventuell werde ich in Zukunft die Stromversorgung direkt über die Fernbedienung realisieren.
Ich verwende die App FlightDeck von Craft&Theory um zusätzliche Telemetrie-Daten und Grafiken anzeigen zu lassen. Falls das OSD oder das gesamte Kamerasignal ausfällt kann somit noch nach Instrumenten geflogen werden. Auch diese App lässt sich editieren und an die eigenen Bedürfnisse anpassen.
|




Video / OSD
Als FPV-Kamera kommt eine Swift 2 von RunCam mit CCD-Sensor zum Einsatz. Um zusätzliche Informationen auf dem Kamerabild anzuzeigen, wird das MinimOSD-Modul verwendet. Hierdurch ist es möglich beispielsweise einen künstlichen Horizont, Höhenmesser, Fahrtmesser oder Kompass anzuzeigen. Zusätzlich können auch Navigationsdaten wie zum Beispiel die Richtung und Entfernung zum Startpunkt oder zum nächsten Wegpunkt angezeigt werden.
Das OSD besteht aus einer kleinen Platine mit einem ATmega Prozessor und hat Anschlüsse für Telemetrie-Daten, Video-Eingang und Video-Ausgang. Der Telemetrie-Anschluss wird mit dem mit Telem2-Port des Hauptboards verbunden, der Video-Eingang mit dem Kamera-Signal und der Video-Ausgang zum Video-Sender. Der Telemetrie-Anschluss dient als serielle Schnittstelle. Am PC angeschlossen, können Firmwareupdates aufgespielt werden und auch die Konfiguration des OSD editiert werden.
Ich nutze eine auf GitHub veröffentlichte Firmware die ein paar Detailverbesserungen bietet und die maximale Leistung aus dem kleinen Board herausholt. Es lassen sich nun bis zu 4 verschiedene Bildschirme anzeigen, die auch während des Fluges umgeschaltet werden können. Somit kann man sich je nach Bedarf und Situation verschiedene Informationen anzeigen lassen.Es können sehr viele Parameter auf jedem Bildschirm angezeigt und frei positioniert werden. Man hat somit wirklich jederzeit einen sehr guten Überblick über den Status des Systems.
Der Video-Sender ist ein TS832 und bietet im 5,8 GHz-Band 48 Kanäle. Der Sender wird unter dem Label von Boscam und Eachine vertrieben. Neben dem Videosignal wird auch Audio übertragen. Auf dem Sender befindet sich dazu ein Mikrofon, es kann jedoch auch eine externe Audioquelle angeschlossen werden. Mit dem Sender sind Reichweiten von 5 Kilometer möglich, unter idealen Bedingungen können Distanzen von bis zu 9 km überbrückt werden.
Um die Kamera auch unabhängig von der Flugrichtung des Flugzeuges bewegen zu können, verwende ich eine Kamerhalterung die mit Servos in zwei Achsen bewegt werden kann. Die Servomotoren sind an den Flightcontroller angeschlossen und können über zwei Kanäle der Fernbedienung ferngesteuert werden.
|





Telemetrie-Funk
 SikRadio
SikRadio

Die Firmware und die Sendeparameter der Module können entweder direkt im Mission Planner oder aber mit dem Sik Radio Config-Tool angepasst werden. Entsprechend der gesetzlichen Vorgaben können, abhängig vom Modultyp und den eigenen Bedürfnissen, Sendeleistung, Fehlerkorrektur, Bandlage, Baudrate, Einschaltdauer und ähnliches eingestellt werden.
Mission Planner
Die wichtigste Softwarekomponente ist der Mission Planner. Mit diesem mächtigen Werkzeug werden alle Einzelkomponenten miteinander verbunden. Zudem dient sie als Einsatzzentrale während des Fluges. Beim ersten Start des Programms wird die Firmware des angesteckte Flightcontroller geflasht und entsprechend den Vorgaben ein erster Parametersatz eingestellt. In der Oberfläche kann anschließend jederzeit die Konfiguration geändert werden. Es kann die Funktion der verwendeten Schnittstellen umbelegt werden, die Funktion der Servos und vieles, vieles mehr. Die gesamte angesteckte Peripherie wird hier ebenfalls im Flightcontroller angemeldet. Der Fluggeschwindigkeitssensor wird beispielsweise in der Oberfläche aktiviert und eingestellt, dass die Daten über den ADC eingelesen werden sollen. Anschließend steht dieser Sensor dem Controller zur Verfügung und er kann die ermittelten Messwerte nicht nur Anzeigen, sondern auch zum Steuern des Modells verwenden.
Die Kommunikation mit dem Flightcontroller erfolgt über einer serielle Schnittstelle im MAVLink-Protokoll. Dazu kann entweder ein USB-Kabel zwischen Controller und PC verwendet werden oder die Telemetrie-Funkverbindung.
Reichweite
Da das Modell noch nicht komplett aufgebaut wurde, können bislang nur Abschätzung zur Reichweite der einzelnen Funkverbindungen gemacht werden. Die Werte in der folgenden Tabelle sollen aber einen ersten Erwartungswert liefern. Da jedoch neben der Sendeleistung auch der Antennengewinn und das Wetter einen großen Einfluss haben, werden diese Zahlen später präzisiert.
| Reichweite | Frequenz | Dienst |
|---|---|---|
| 500 m | 433 MHz | PC Telemetrie |
| 900 m | 5,8 GHz |
Video, Audio |
| 1500 m | 2,4 GHz | Fernsteuerung und Telemetrie |
Rechtliches
Die Bedingungen zum Betrieb von Modellflugzeugen sind durch mehrere Gesetze stark reglementiert. Dies betrifft sowohl das eigentliche Fliegen von Flugzeugen, als auch die Konfiguration der verwendeten Hardware. Ohne Anspruch auf Vollständigkeit, Aktualität und Korrektheit, sollen hier die wichtigsten rechtlichen Aspekte aufgezeigt werden.
Haftpflicht
Da fast alle Flugobjekte sind laut §1 Luft VG (Luftverkehrsgesetz) als Luftfahrzeuge klassifiziert. Explizit sind alle Objekte genannt, die Flughöhen von mehr als 30 Metern erreichen können. All diese Flugobjekte sind nach §43 LuftVG verpflichtet eine Hafpflichtversicherung abzuschließen. In §37 LuftVG ist dann abhängig vom Gewicht geregelt, bis zu welchem Deckungsbetrag versichert werden muss. Der Betrag ist dort nicht direkt in Euro angegeben und muss erst umgerechnet werden. Es ergibt sich dann ein Versicherungsbetrag von rund 900.000 €. Eine Haftpflichtversicherung die einen Schaden von 1 Mio.€ abdeckt ist also nicht nur empfehlenswert sondern gesetzlich vorgeschrieben.
Drohnenverordnung
 Auszug Flyer BMVI
Auszug Flyer BMVI

In der Drohnenverordnung wird in weiten Teilen nicht zwischen Multikoptern und Modellflugzeugen unterschieden. Eine Ausnahme besteht aber bei der erlaubten Flughöhe. Multikopter dürfen ohne Ausnahmegenehmigung nur Flughöhen von maximal 100 m erreichen. Modellflugzeuge dürfen hingegen, wenn ein Kenntnisnachweis vorliegt, auch höher fliegen.
Es darf nur in Sichtweite geflogen werden. Wird mit einer Videobrille geflogen, darf höchstens 30 m hoch geflogen werden und das Startgewicht muss unter 0,25 kg liegen. Ist das Modell schwerer, muss eine weitere Person anwesend sein und den Luftraum überwachen.
Verbotszonen
Eine Annäherung von weniger als 100 m oder der Überflug von diversen Bundes- oder Landesorganen ist verboten. Dazu zählen unter anderem Justizvollzugsanstalten, militärische Anlagen und Truppenteile, Bundes- und Landesbehörden und Polizei; aber auch Industrie- und Energieversorgungsanlagen und Krankenhäuser. Neben Gebäuden und Liegenschaften sind auch Autobahnen und Bundestraßen, Wasserstraßen und Bahnanlagen, Menschenansammlungen, Katastrophengebiete, Unglücksorte, Einsatzorte mit eingeschlossen.
Der Überflug von Naturschutzgebieten und Nationalparks ist untersagt. Der Überflug von Wohngrundstücken ist nur gestattet, wenn die Eigentümer diesem ausdrücklich zugestimmt haben. Ohne Zustimmung ist der Überflug nur für Objekte leicher als 0,25 kg und nur wenn diese nicht in der Lage sind Audio-, Video- oder Funksignale zu empfangen, zu senden oder aufzuzeichnen.
Funk
Auch das Funken unterliegt gesetzlichen Regularien. Prinzipiell ist nur das Senden in den Frequenzbereichen des ISM-Bandes oder des SRD-Bandes gebührenfrei für jedermann frei erlaubt. Abhängig von der Anwendung haben sich hier bestimmte bevorzugte Frequenzbereiche für den Modellflug herausgebildet. Die gesetzlich beschränkten Parameter sind neben dem Frequenzbereich vor allem das Kanalraster, die Frequenzbelegungsdauer und die Ausgangsleistung.
| Band | Frequenzbereich | Sendeleistung |
|---|---|---|
| 433 MHz | 433,05-434,79 MHz | 10 mW |
| 860 MHz | 863-870 MHz | 10 mW |
| 2,4 GHz | 2,4 GHz - 2,4835 GHz | 100 mW |
| 5,8 GHz | 5,725 GHz - 5,875 GHz | 200 mW |